如何防止滑倒摔跤?这是一个与人们生活息息相关的科学问题。每年都有大量的人因为滑倒导致不同程度的受伤,从而影响正常生活。尤其对于老年人而言,摔跤甚至可能意味着生命的结束。正是这样一个“接地气”的问题,引起了仿生领域科学家的注意,试图通过鞋底材料的仿生设计来解决问题。
【研究成果】
近日,美国麻省理工学院Giovanni Traverso团队受自然界中动物千奇百怪的行走方式的影响,包括使用爪子(猫科动物、鸟类)、鳞片(蛇类)等,利用玲珑精巧的剪纸艺术,开发出一种可以动态调节与地面的摩擦力、有效增加抓地力的新型仿生鞋底材料。该工作发表在自然杂志子刊《Nature Biomedical Engineering》上,题为:“Bioinspired kirigami metasurfaces as assistive shoe grips”。
【图文解析】
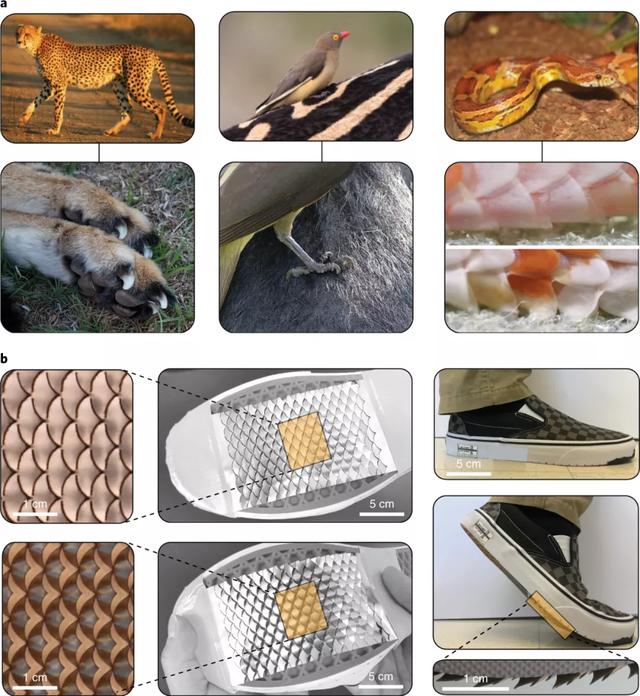
1.Kirigami鞋底的设计原理。
在自然界中,动物有多种策略来增加抓地力,提高生存能力。例如猎豹的半伸缩爪,啄木鸟的反相抓扣的锋利爪子以及蛇类的同向排列鳞片(图一a)。Kirigami是日本折纸的一种艺术形式,具有空间上的可变性,其样式变化的灵感被广泛地应用于各类 “超材料” 的设计制备中。在本报道中,作者们使用钢片在鞋底制备出kirigami结构(图一b),这种结构可以在鞋底平放和弯曲变形时变换出不同的外形。简而言之,在步行过程中,通过改变鞋底的曲率来激活 “kirigami鞋钉” ,以增强鞋钉与步行表面之间的摩擦性能,并降低滑倒和摔倒的风险。
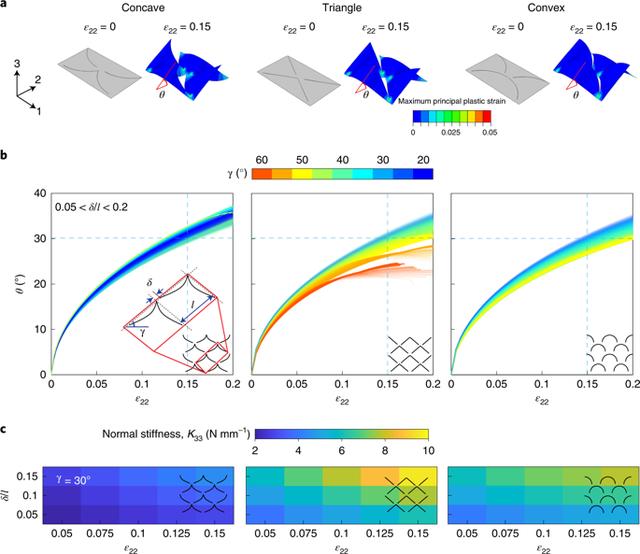
2.Kirigami鞋底不同鞋钉形状的机械设计。
通过对切角(γ)和空间维度比(切片宽度δ与周期性栅格的特征长度l之比)的调控,作者们设计了不同机械响应模式的kirigami图案,包括凹型、三角型和凸型三种鞋钉形状。图二a展示了这三种结构受到不同面内单轴应变(ε22)时的单元变化的数字模拟快照。图中色块变化表示最大主塑性应变的分布。可以发现,施加的形变量触发了屈曲不稳定性,从而导致三种图案模式都出现峰角屈曲和弹出。此外,如图二b所示,对于20°< γ <60 °和0.05<δ/l<0.2这个范围而言,可以观测到不同鞋钉结构的翘起角度随着面内单轴应变(ε22)变化而变化。图中虚线位置可以看出,在面内应变达到0.15时,鞋钉可以翘起约30°。对γ=30°,δ/l=0.06,0.1和0.15的三种鞋钉形状的kirigami表面进行有限元模拟可以发现(图二c),当被拉伸到正常步态时的最大拉伸应变(ε22=0.15)后与硬板接触时,δ/l=0.15的结构表面可以带来鞋钉翘起部分的最大硬度。
3.鞋钉的形状和排布对kirigami鞋底的摩擦增强效果。
作者们随后对三种形状的鞋钉(凹型、三角型、凸型)在常态和弯曲时(图三a)与不同基底(冰面、乙烯基基底和硬木)的摩擦力进行表征。对于冰面和硬木而言,由于kirigami鞋钉穿透深度较浅,其摩擦模式为平滑模式,即达到静态摩擦力的峰值后维持在动态摩擦力的平台期。而对于乙烯基这样的半硬基底,鞋钉穿透进基底而呈现出粘滑模式,即摩擦力在最大值和最小值之间周期性变化(图三b)。不同形状的鞋钉在不同基底上的规律也不尽相同,这与其穿透能力有关。此外,相对于具有同样厚度同样材质的常规鞋底,所有kirigami结构都具有明显的抓地力优势(图三c)。与此同时,鞋钉的排布方式也至关重要,凹面鞋钉的五种不同排布(单向、三列、交替行、方格和镜像)都呈现出不同的抓地效果(图三d、e、f)。

4.人体实测行走时kirigami鞋底与地面摩擦力。
作者最后进行了常规步幅行走时的鞋底摩擦力的真人测试(图四a)。通过脚下的力学感应器分别测试脚底三个正交方向的力值变化(Fx表示前进方向、Fy表示横向、Fz表示人体竖直方向上的力),其中横向力几乎为零。相同的志愿者保证法向力相同,与商品鞋底和对比组相比,kirigami鞋底展现出更强的最大摩擦力(图四b)。此外,五种不同排布方式的kirigami鞋底在冰面上的摩擦系数都接近是多种商品鞋底的两倍。

【总结展望】
目前,作者们正在研究如何更好地附着和融合这种kirigami鞋底。他们正在考虑将其嵌在鞋体下,或者将其设计成一个单独的元素,以便在需要时进行附加。他们也在探索使用不同材料的可能性,例如带有加强钢尖端的橡胶聚合物。虽然研究人员最初的动机是防止在结冰的表面上打滑,但他们预计这种鞋夹在其他环境下也会有用,比如潮湿或油性的工作环境。
全文链接:https://www.nature.com/articles/s41551-020-0564-3#Sec16
