响应外部刺激,可逆转换的粘附力已引起广泛的工业,生物医学,制造和机器人应用的兴趣。在迄今为止开发的方法中,电粘附力提供了对静电吸引力的简单且可逆的控制在受到电场作用的两个表面之间。与其他机制相比,电粘附具有一些优势,例如精确控制粘附力,响应速度快,没有残留物,运行安静以及能耗低。特别是,触觉和机器人领域已越来越多地采用电胶粘剂,例如,使软抓手,爬壁机器人,触摸屏和用于触摸虚拟物体归功于它们在可拉伸的电介质,并且具有在小尺寸和轻巧的情况下发挥作用的能力。但是当前基于电子导体和绝缘介电层的电胶粘剂通常受到对几千kV范围内施加高压的需求的限制,这不仅存在安全隐患,还需要与高压兼容的专用电路元件,降低工作电压的一种策略是减小电胶粘剂的电介质层厚度,因为标准的平行板电容器模型表明静电力与电抗力成反比。
介电电胶粘剂以前不可能在几伏特的范围内工作,但是代替介电层,带电的大分子已显示出在低得多的电势下可逆粘附的巨大希望。带有相反电荷的聚阴离子和聚阳离子的离子络合,可响应外部刺激提供可逆转换的粘附机制,广泛用于许多生物系统中。带有相反电荷的聚电解质之间的络合物形成使得能够支撑1.5 MPa的剪切应力的牢固粘附力得以实现,而随后添加盐则使两种聚电解质由于静电相互作用的筛选而脱离。后来有研究证明了通过使用几伏范围内的电势产生离子的浓度梯度来电切换聚阴离子和聚阳离子水凝胶之间的粘附力,但是这些示例仅限于在水中进行操作,到目前为止仅实现了两个附着状态(附着或分离)。在无液体的条件下在低电压下实现电粘附仍然是一个巨大的挑战,并将这种方法扩展到新的应用领域具有巨大的潜力。
《Science》中暗含一篇《AM》
2020年2月14日,美国马萨诸塞大学Ryan C. Hayward教授和哈佛大学Suo Zhigang院士合作开发出利用离子双层来矫正和切换离子电流的离子弹性体二极管、晶体管。团队设计了两种分别带有阳离子和阴离子的聚电解质网络,其缔合的相反离子可以移动。将主链带有相反离子的弹性体构建成离子双层(IDL),它能够在不发生电化学反应的情况下进行整流和“开-关”离子电流。缔合的离子移动发生熵驱动损耗会产生离子异质结,其意义可类比PN结。传统的PN结无法拉伸,而本征可拉伸离子弹性体异质结则为可拉伸离子器件奠定了基础。相关论文以“Ionoelastomer junctions between polymer networks of fixed anions and cations”为题,发表在《Science》上。
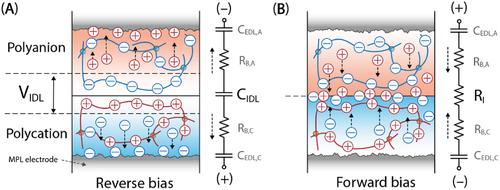
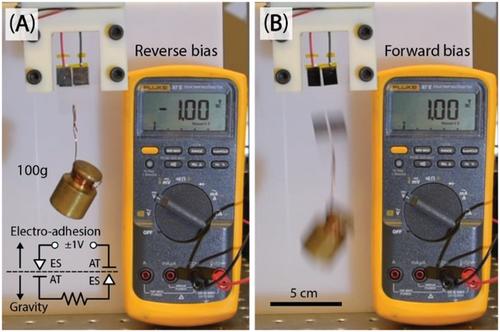
近日, 哈佛大学锁志刚教授和马萨诸塞大学阿默斯特分校Ryan C. Hayward教授再次联手在Advanced Materials发表文章, 展示了可在≈1V的电势下基于离子弹性体异质结的新型的电胶粘剂。通过调节IDL两端的电压可逆控制两种离子弹性体之间的附着力。如图1A所示,在“反向偏压”下,流动离子被拉离界面区域,导致IDL中积累了过多的固定电荷。这些薄的界面层中多余的固定电荷所产生的电场会引起两种离子弹性体之间的静电粘附。在“正向偏压”下(图1B),移动阳离子从聚阴离子域进入聚阳离子域,反之亦然。因此,界面表现为电阻性并且两种离子弹性体之间的静电粘附力消失了。
图1:在反向偏压(A)和正向偏压(B)下操作的聚阴离子/聚阳离子离子弹性体连接的示意图。
本研究使用了聚(1-乙基-3-甲基咪唑(3-磺丙基)丙烯酸酯)(ES)和聚(1-[2-丙烯酰氧乙基]-3-丁基咪唑双(三氟甲烷)磺酰亚胺) (AT) 的交联网络展示了基于离子弹性体的电粘附。在没有施加电压的情况下,使用高度交联的ES和AT(包含20 mol%的聚(乙二醇)二丙烯酸酯交联剂)来降低两种离子弹性体之间的粘附力,并且通过添加气相二氧化硅颗粒(2.5 wt%)来增强两种离子弹性体的稳定性。
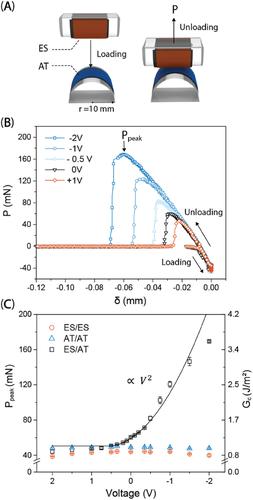
为了表征ES和AT离子弹性体之间的电粘附,本研究使用具有交叉圆柱体几何形状的接触粘附测试(图2A)。根据Derjagui近似,交叉圆柱体等效于平面上的球面几何形状,它将产生明确定义的接触点,并使气隙对电粘附的影响最小。所施加的载荷(P)和位移(δ)的测量值(图2B)为将两个垂直交叉的圆柱体(半径r = 10 mm)放在一起,以0.05 mm s-1的恒定速度在ES和AT层之间产生接触,并保持固定位移30 s进行充电离子弹性体,然后在固定电压下以0.05 mm s-1的相同速度分离。根据约翰逊·肯德尔·罗伯茨(JKR)模型用于弹性材料之间的胶粘剂接触计算,可以将峰值分离载荷(Ppeak)转换为临界应变能释放速率(Gc)Ppeak =(3/2)πrGc。图2C显示了在各种施加电压下,三个离子弹性体结(即ES / ES和AT / AT同质结以及ES / AT异质结)的Ppeak和Gc值。
图2:A)使用交叉圆柱几何形状的接触附着力测试的示意图。B)在外部偏置下,ES / AT交汇处的典型载荷-位移曲线,其中蓝色和红色数据点分别表示反向和正向偏置。C)三个离子弹性体连接的Ppeak值。
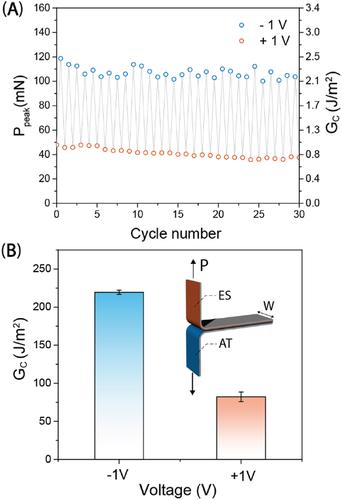
紧接着,ES / AT电胶粘剂的可逆性是通过在±1 V的交流电压下多次测量Ppeak来测试的。在30个重复循环中,“接通”状态(−1 V)和观察到“关闭”状态(+1 V)为41±4 mN(图3A)。导通和关断状态的Gc对应值分别为2.3和0.9 J m-2。此外,本文进一步测量了图3B中插图所示的ES和AT剥离的Gc。在0.2 mm s-1的裂纹速度下,两种离子弹性体在+1 V时容易剥离,从而产生Gc = 82±6 J m-2。相反,在-1 V处,测得的Gc = 220±3 J m-2明显更高。本文预推测与接触粘附力测试相比,Gc值更大主要原因是在T型剥离测试过程中受相对较快的裂纹扩展速度的影响。至关重要的是,与常规电胶相比ES和AT层之间的电胶对缺陷的耐受性强得多。
图3:A)在±1 V的交流电压下通过接触粘附力测试测量的ES / AT异质结峰。蓝点表示反向偏置(-1 V),红点表示正向偏置(+1 V)。B)ES / AT异质结的T剥离测试,用于测量剥离的能量释放速率(Gc)。
最后,本文演示了一种离子弹性体电粘附贴,该贴在+1 V时可承受5 kPa的剪切载荷,如图4所示。该垫由两个部分组成:一个包含连接到电源的ES和AT,另一个包含通过导线连接的两种离子弹性体。通过这种几何形状,第二贴可用于保持重量而无需连接到电源。在图4A的插图中示出了该系统的电路图。当对离子弹性体电粘附垫施加-1 V电压(每个粘附垫均包含1 cm2的ES和AT)时它们可以承受100 g的重量,对应于5 kPa的剪切应力。当外部电压切换至+1 V时,焊盘在约1 s的时间范围内失去附着力并彼此分离。这些离子弹性体结电胶粘剂对于软和微机器人应用的设计特别有吸引力,因为无需大型和重型高压放大器或专门设计的高压可操作晶体管和逻辑元件即可对其进行控制。在当前实施方式中离子弹性体电粘合剂仅在极性相反的两种特定材料之间提供增强的粘合性。尽管这种选择性的互补粘合本身就可以使用(例如,维可牢尼龙搭扣,拉链和纽扣),但使用离子弹性体实现低压粘合到更多其他表面上也很有价值。
图4:ES / AT离子弹性电粘附垫,可在-1 V的施加电势下承受5 kPa的剪切载荷。这些垫由两个部分组成:一个包含连接到电源的ES和AT层,另一个包含ES和AT层用导线连接。
总结与展望:
总之,这项研究已经证明离子弹性体结提供了一种新型的电胶粘剂,可以用低电压(≈1V)进行控制。在反向偏压下,对界面离子双层充电会在两种离子弹性体之间提供静电力,而在正向偏压下,可移动离子会被推入IDL并最终穿过界面,从而破坏电场,从而大大降低粘附力。因此,这项研究的发现为设计电胶粘剂提供了一个全新的平台,该电胶粘剂能够在低工作电压下可逆地切换粘合力,并且比传统的介电电胶粘剂更能承受损坏。这种方法将在许多领域打开新的机遇,例如包括机器人技术,虚拟现实硬件和响应材料。
全文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202000600
 游客2楼
游客2楼