Near-Infrared Light-Driven Shape-Morphing of Programmable Anisotropic Hydrogels Enabled by MXene Nanosheets
https://doi.org/10.1002/anie.202014533
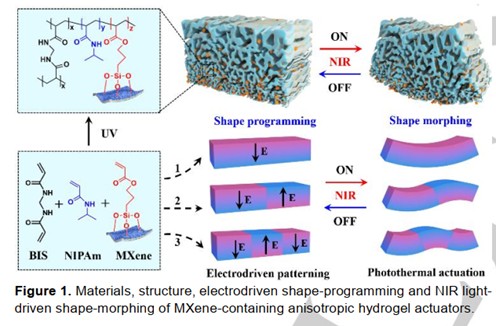
柔软,光敏,可编程且具有多种形状变形功能的合成材料已成为开发具有无线可控性和仿生功能的下一代智能机器人的航道。该文报告了通过巧妙设计的MXene纳米单体与热敏水凝胶网络的原位自由基共聚制备的可编程MXene各向异性水凝胶,进而来促动器的近红外(NIR)光驱动变形。发现低电场(很少V mm-1)可以实现MXene纳米片的空间分布,因此将各向异性引入到水凝胶网络中。通过控制ITO电极图案,直流(DC)电场方向和掩模辅助的光聚合反应,开发了可编程各向异性水凝胶致动器。为验证概念,该文演示了含MXene的各向异性水凝胶的近红外光驱动形变,使其具有各种形状,并设计了一种四臂软抓取器,该抓取器可以执行不同的光机械功能,例如抓取,抬起/放下和释放物体连续NIR曝光后,该模式将为可编程和可重新配置的智能执行器的发展提供动力,这些执行器可以在诸如软机器人或机器,生物医学设备等各个领域具有十分大的发展前景。
MXene artificial muscles based on ionically cross-linked Ti3C2Tx electrode for kinetic soft robotics
DOI: 10.1126/scirobotics.aaw7797
现有的离子人工肌肉仍需要技术突破,以实现更快的响应速度,更高的弯曲应变和更长的耐用性。该文报道了一种基于离子交联的Ti3C2Tx与聚(3,4乙二氧基噻吩)-聚(苯乙烯磺酸盐)的MXene人工肌肉,在DC响应中显示超快的上升时间(在1 s内),最大的弯曲应变高达1.37%。极低的输入电压范围(0.1至1 V),高达18,000个周期的97%的长期循环稳定性,显着降低的相位延迟以及高达20 Hz的非常宽的频率带宽以及良好的结构可靠性,在连续电刺激下不会分层。这些人造肌肉被成功地用于制作折纸风格的水仙花机器人,作为可穿戴的胸针,并在蝴蝶上跳舞蝴蝶和树叶作为动感艺术作品。这些成功的演示阐明了基于MXene的软执行器在下一代软机器人设备(包括可穿戴电子设备和动力学艺术品)中的巨大潜力。

该内容被隐藏,只有指定用户组可见